Machine Tool
| 型号 | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| 尺寸 | 总长 (mm) | 265 | ||
| 总高 (mm) | 140 | |||
| 总宽 (mm) | 139 | |||
| 质量 (kg) | 5.5 | |||
| 设定扭矩 (Nm) | 47 | 80 | 107 | |
| 对应卡爪 | BR06 / BRT06 | BR08 / BRT08 | BR10 / BRT10 | |
| 对应软爪 ※爪最大高度: 56 mm |
SJ06B1 SJ06S1 |
SJ08B1 SJ08A1 SJ08S1 SJ08A1-056 SJ08A1T056 |
SJ10B1 SJ10S1 |
|
※请将工爪最大高度加工为56mm以下再使用。
| START | 压力空气供给 | OFF= 停止、ON= 转动 | |
|---|---|---|---|
| 负荷 | 电磁阀 (DC24V/50mA 以上) | ||
| DIR | 转动方向切换 | OFF= 右转 (拧紧方向)、ON= 左转 (松缓方向) | |
| 负荷 | 电磁阀 (DC24V/50mA 以上) | ||
| LOW | 微速反向旋转指令 | OFF= 拧紧・松缓模式、ON= 微速反向旋转模式 | |
| 负荷 | 光电耦合器 (DC24V/20mA 以上) | ||
| STOP | 停止 | ON= 到达设定扭矩或检出错误 | |
| 信号输出方式 | 集电极开路输出 (DC24V/30mA 以下) | ||
| ERR | 错误信号 | ON= 检出错误 ON条件 ・拧紧时扭矩不足: 拧紧计时器时间经过(10 秒) ・松缓时达到扭矩极限: 达到160Nm。 ・扭矩过大:设定扭矩+20Nm以上。 |
|
| 信号输出方式 | 集电极开路输出 (DC24V/30mA 以下) | ||
| 电源 | DC24V/10W 以上 | ||
| 设定扭矩 | 拧紧时:20~150Nm/松缓时最大:160Nm | ||
| 判定指示灯 | 绿:与START信号同步亮起 | ||
| 红:与 ERR 信号同步亮起。 | |||
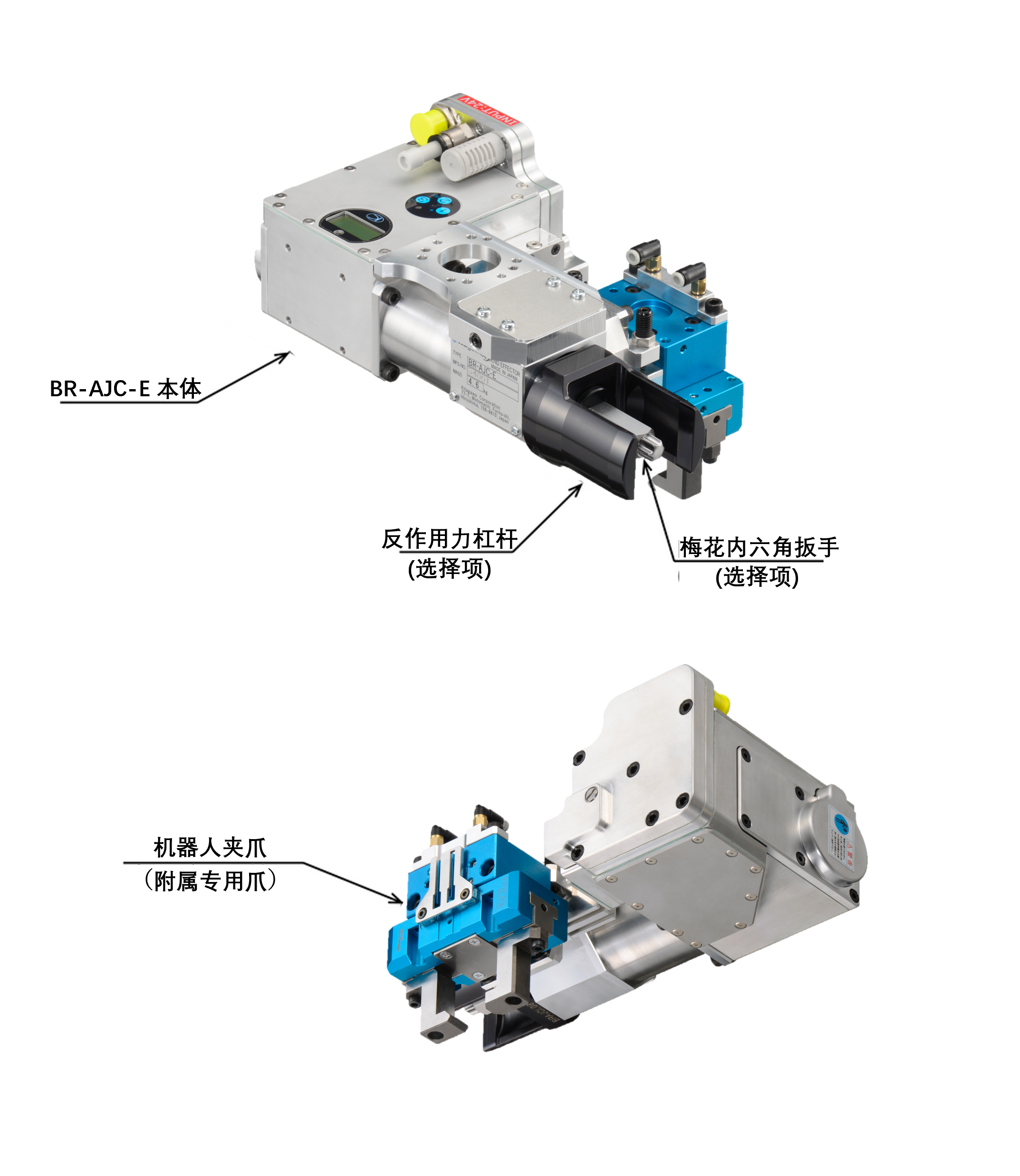
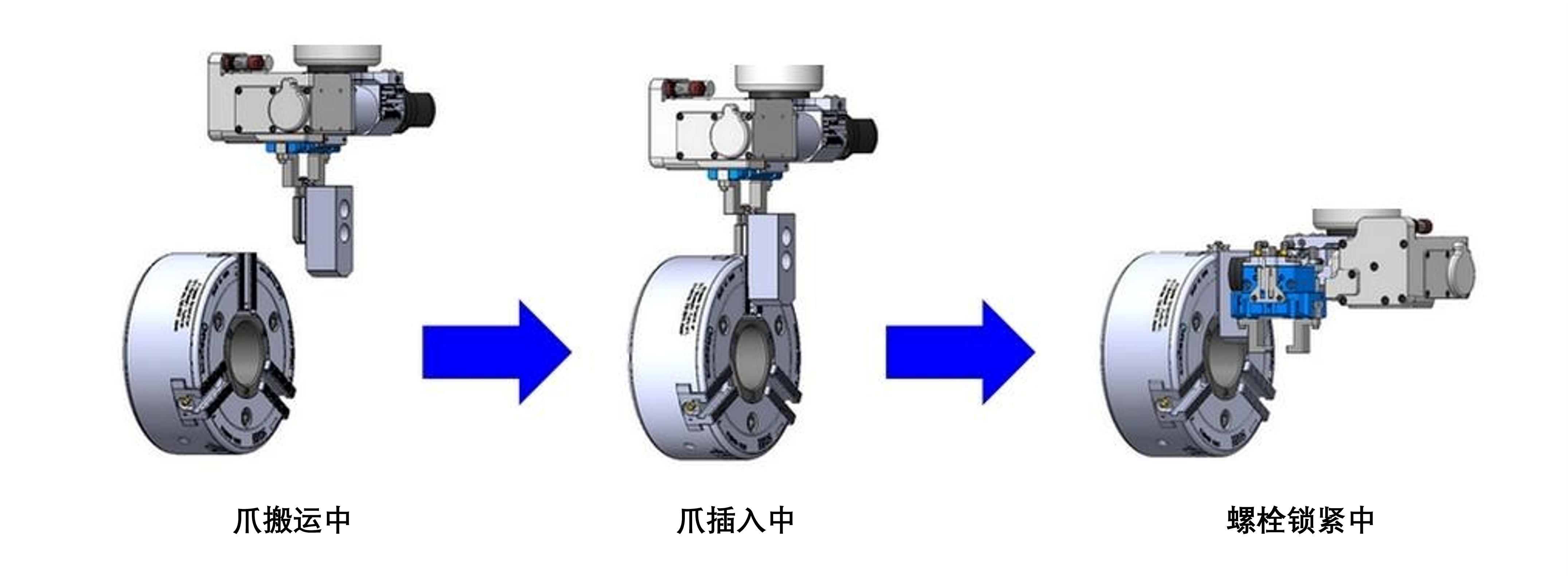
可将既有BR/BRT卡盘升级为无人全自动工爪交换系统。

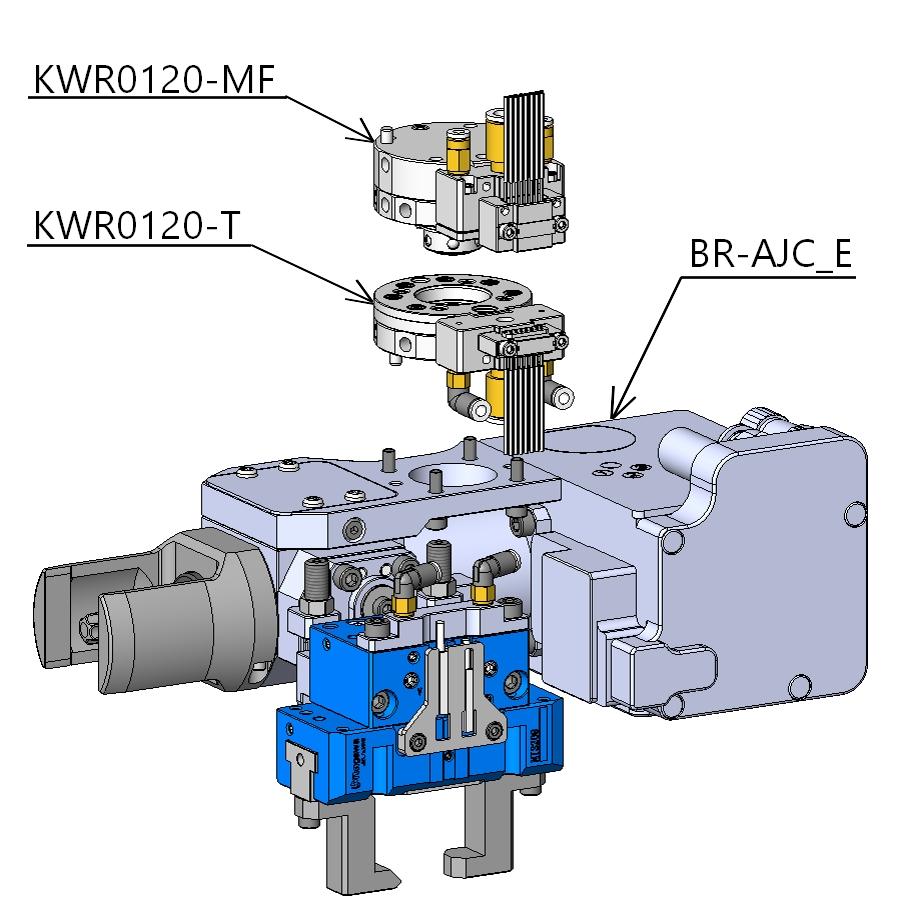
北川机械夹爪快换装置KWR0120型号产品的话可以直接安装,并可搭配北川机器人夹爪来自动更换加工工件。
| 卡盘型号 | 本体 | 反作用力杠杆 | 专用T型块 | 垫圈 |
梅花内六角螺栓 附有O型密封圈 |
工爪储藏架 | |
|---|---|---|---|---|---|---|---|
| BR-AJC-E (附有工爪搬送用机器人夹爪) |
BRAJCL06 | BRAJCWT10 |
BRAJCWS10 |
BRAJCBT10 |
BR-AJC06S | ||
| BR08 / BRT08 | BRAJCL08 | BRAJCWT12 | BR-AJC08M |
BRAJCWS12 |
BRAJCBT12 |
BR-AJC08S | |
| BR10 / BRT10 | BRAJCL10 | BR-AJC10M | BR-AJC10S |
本体 (反作用力杠杆、梅花内六角扳手)
| 型 号 | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| 2D |  |
|
|
|
| TIF |  |
|
|
|
| DXF |  |
|
|
|
| DWG |  |
|
|
|
| 3D | Parasolid |  |
|
|
| STEP |  |
|
|
|
专用特殊T型块
| 型 号 | BR-AJC06M | BR-AJC08M | BR-AJC10M | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|
垫圈
| 型 号 | BRAJCWS10 | BRAJCWS12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
有O型密封圈的梅花内六角螺栓
| 型 号 | BRAJCBT10 | BRAJCBT12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
工爪储藏架
| 型 号 | BR-AJC06S | BR-AJC08S | BR-AJC10S | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|

拥有多种型号, 世界的标准强力卡盘。

超群的锁紧力. 安定性特殊对应卡盘。

品质管理和安全作业的 必需品。

多品种. 少量生产用手动锁紧卡盘。

发挥卡盘高性能的 回转油缸。

紧凑.与高精度卡盘 组合更适合。

采用屈臂联轴机构, 大开口虎爪。

气.油缸内藏, 替代夹具的轻便夹盘。


顶尖尾座,圆盘式尾座, 传动螺杆及其他。


Kitagawa标准的高品质, 高耐久机械卡爪。

工厂自动化,无人化的最佳搭档

各种目录可以下载


介绍生产中止产品的 明细型号












{kind=link}